Case studies
(Extract)
Results & Technical-Economic Viability :
Our holistic approach went beyond mechanical design to include a comprehensive technical-economic study. By calculating energy gains in MWh/year and establishing clear Return on Investment (ROI) metrics, we demonstrated the feasibility of a system with a payback period of less than seven years.
Core Capabilities Demonstrated:
- Advanced CFD & Mesh Optimization.
- Complex System Integration in sensitive aviation environments.
- Structural Reliability through rigorous FEA.
- Innovation in Renewable Energy for the aerospace sector.
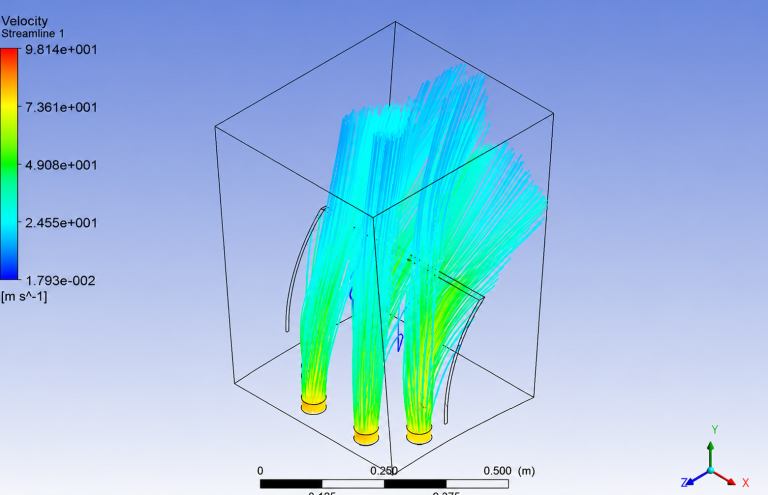
- Advanced CFD Simulations:
To optimize energy extraction, we conducted extensive Computational Fluid Dynamics (CFD) studies. By modeling streamlines and thermodynamic states, we precisely mapped the velocity and pressure distribution of the exhaust flow to identify the ideal placement for recovery units.
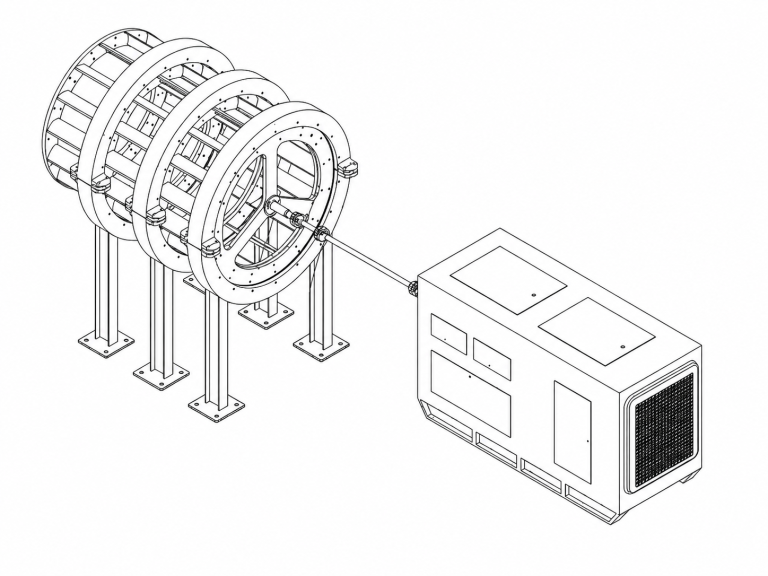
- Precision Actuator Design:
We designed several specialized energy recovery units, ranging from radial flow capture systems to axial fans integrated into specialized conduits. Each design was validated through simulation to ensure maximum torque production and aerodynamic efficiency.
- FEA & Structural Analysis:
To guarantee safety and durability, all support structures were modeled in specific Software. We performed Finite Element Analysis (FEA) to assess resistance against significant weights (up to 18,000 daN) and environmental factors like wind effects, ensuring the structural stability of the entire system.
A demonstration of our Multi-Disciplinary Engineering Approach, this project exemplifies our ability to manage complex, system-level engineering by integrating disparate technical domains into a cohesive, high-performance solution.
- System Modeling & Functional Analysis:
We initiated the project with a rigorous functional analysis and the development of FAST diagrams. This allowed us to translate high-level requirements—such as non-intrusive installation and profitability—into specific technical solutions for energy capture.
- High-Fidelity CAD Modeling:
Using CAD Software, our team developed detailed 3D models of the entire test facility and the specific turbojets being maintained (CFM56 series). This ensured that designed components, including double-flux ducts and recovery turbines, integrated perfectly within existing constraints.
The project’s goal was to design an innovative system capable of extracting energy from high-velocity exhaust gas flows during aircraft engine maintenance testing and transforming it into electrical energy for grid injection.
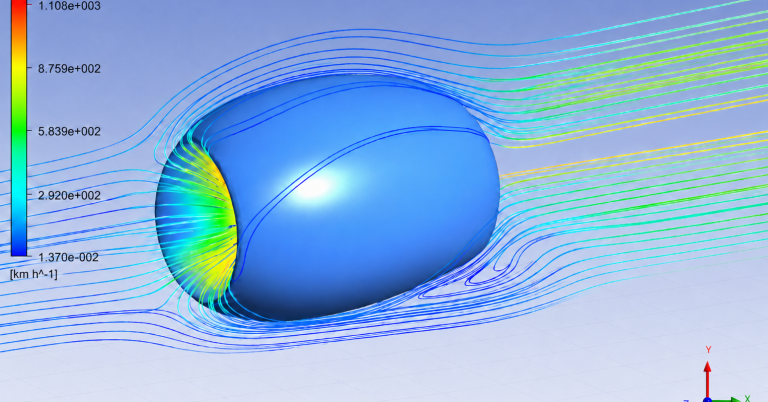
Study and design of an energy recovery system on a turbofan engine test bench.
Results & System-Level Value
The project resulted in a functional steer-by-wire haptic actuator prototype integrating active motor torque, controllable resistive braking, torque and position sensing, embedded electronics, and system-level validation with safety constraints. The work demonstrated the ability to move beyond component design toward complete actuator architecture development, where mechanical, electromagnetic, electronic, sensing, control, and validation domains are engineered together.
Core Capabilities Demonstrated:
- Electromechanical Actuator Architecture Design
- Compact CAD Packaging of Motor, Brake, Sensors, PCB, and Connectors
- BLDC Motor Optimization for Low-Speed Haptic Torque
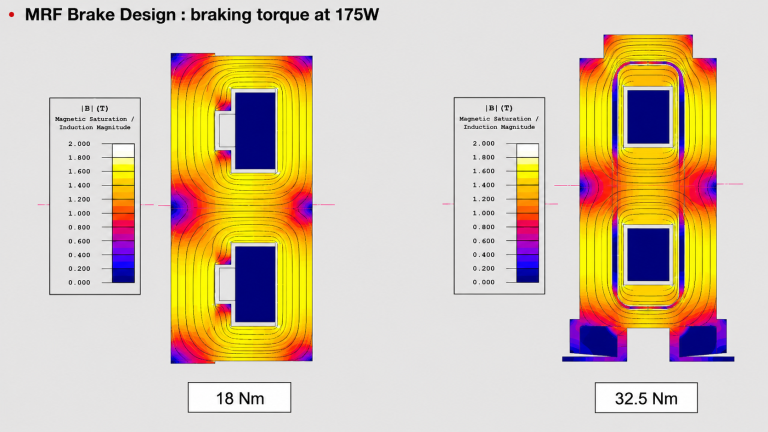
- MRF Brake Design and Magnetic Circuit Optimization
- Torque and Position Sensor Integration
- Embedded PCB and Communication Interface Integration
- FEA, Electromagnetic Simulation, and Thermal/Mechanical Trade-Offs
- Prototype Development and Hardware-in-the-Loop Validation
- System-Level Thinking for Safety-Critical Automotive Applications
- Torque & Position Sensor Integration:
The actuator integrated both torque and position sensing to support closed-loop control and steering feel generation. The sensing architecture required careful mechanical and electronic packaging to preserve measurement quality, reduce sensitivity to noise, and ensure compatibility with the actuator’s electromagnetic environment.
- PCB & Electronics Integration:
Embedded electronics were integrated directly into the actuator envelope, including PCB placement, connector strategy, sensor interfaces, signal routing, and communication with the external control environment. The integration work ensured that the actuator could operate as a complete mechatronic subsystem rather than as a purely mechanical assembly, with safety imposed redundancies on actuation and signals according to customer requirements and ISO26262 standards.
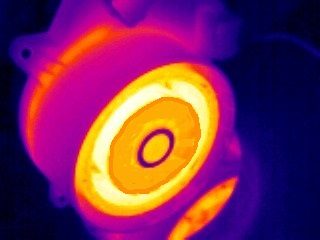
- Simulation, FEA & Electromagnetic Analysis:
Simulation was used to support key design decisions, including electromagnetic behavior, magnetic flux paths, torque generation, mechanical stresses, packaging constraints, and thermal considerations. The goal was to converge toward an architecture that was compact, robust, efficient, and compatible with automotive validation constraints.
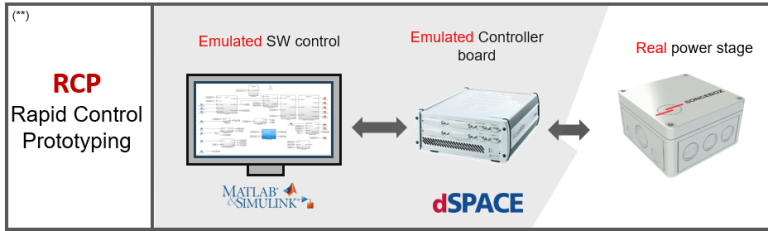
- Prototype Build & Hardware-in-the-Loop Testing:
Functional prototypes were built and tested on Hardware-in-the-Loop benches to validate actuator behavior under realistic steering use cases. Testing included sensor feedback, torque generation, brake response, control interface behavior, and system-level interaction with the steer-by-wire environment.
This project demonstrates our ability to design complex electromechanical actuators from architecture definition to prototype validation, combining mechanical design, electromagnetic optimization, sensing integration, embedded electronics, simulation, and Hardware-in-the-Loop testing.
- System Architecture & Functional Decomposition:
The project started with the definition of the actuator architecture based on steer-by-wire system requirements, including haptic torque generation, safety behavior, compact packaging, sensor integration, and interface constraints. The architecture combined an electric motor, a magnetorheological fluid brake, torque and position sensing, embedded electronics, and mechanical transmission elements into a coherent actuator concept.
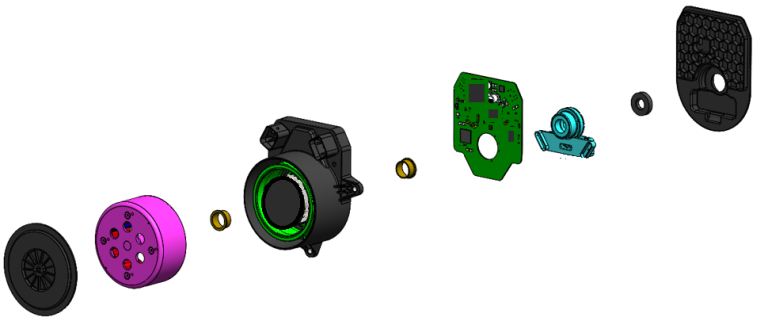
- Mechanical Architecture & CAD Packaging:
A detailed mechanical architecture was developed to package the BLDC motor, MRF brake, position sensor, PCB, connectors, bearings, sealing interfaces, and housing components within a constrained actuator envelope. CAD modeling was used to manage packaging trade-offs, assembly constraints, tolerance-sensitive interfaces, and manufacturability.
- Electric Motor Optimization:
The BLDC motor was optimized for the specific haptic feedback use case, with particular attention to low-speed torque generation, torque ripple, cogging torque, efficiency, thermal behavior, and integration within the actuator housing. The objective was not only to size the motor, but to adapt its electromagnetic behavior to the steering feel requirements.
- MRF Brake Optimization:
The magnetorheological fluid brake was developed as a controllable resistive torque source, complementing the active torque generated by the motor. The design required optimization of magnetic circuit geometry, fluid gap, braking torque capability, sealing strategy, response behavior, and integration with the rest of the actuator.
The project’s goal was to develop a compact, high-performance haptic feedback actuator for a steer-by-wire handwheel system, capable of generating precise, controllable steering feel while integrating motor torque generation, passive braking, position sensing, torque sensing, embedded electronics, and system-level validation into a single actuator architecture.

Haptic Feedback Steer-by-Wire Actuator Development